Use the following steps to connect the Huanyang VFD to the Buildbotics Controller:
- Disconnect power from the VFD controller, the spindle, and the Buildbotics Controller
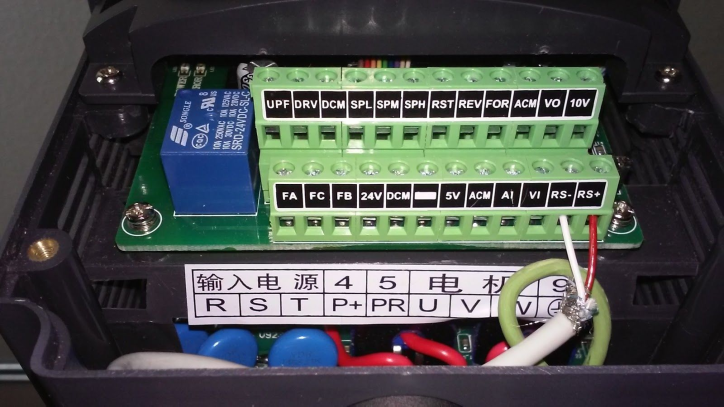
- Remove the front cover from the Huanyang VFD.
- Connect the plus side of the RS485 pair to pin 13 on the DB25 breakout board that connects to the Buildbotics Controller.
- Connect the minus side of the RS485 pair to pin 14 on the DB25 breakout board that connects to the Buildbotics Controller.
- Shielded twisted pair cable is recommended for the connection from the Buildbotics Controller. If you use shielded twisted pair cable, connect the shield to ground on the VFD and to a GND pin on the 25-pin breakout board.
- Connect the DB25 breakout board to the back of the Buildbotics Controller
- Reconnect power.
- Replace the cover on the VFD.
- Apply power to the VFD.
Using the procedure in the Huanyang manual, set the following register values:
- Set PD000 to 0 - unlock parameters
- Set PD001 to 2 - Command source is RS485
- Set PD002 to 2 - Speed source is RS485
- Set PD163 to 1 - Communications address 1
- Set PD164 to 1 - 9600 b/s
- Set PD165 to 3 - 8 Bit No Parity - RTU
- Set PD000 to 1 - lock parameters
Finally, configure the Buildbotics Controller for spindle control as described in the Buildbotics Controller Manual.